
Huajian HUANG
Hi, I'm Huajian Huang.
I completed my PhD in Computer Science at the Hong Kong University of Science and Technology in 2023,
advised by Professor Sai-Kit Yeung.
Before the PhD, I received my B.E. at the Sun Yat-Sen University, China.
My research focuses on omnidirectional perception, visual localization, mapping, SLAM and 3D vision.
Update
- [Jan 2025] A paper accepted to ICLR 2025
- [Jan 2025] A paper accepted to ICRA 2025
- [Oct 2024] Two papers accepted to WACV 2025
- [Jul 2024] A paper accepted to ECCV 2024
- [Feb 2024] Two papers accepted to CVPR 2024
- [Dec 2023] Passed thesis defense. Thesis title: Omnidirectional Perception: Advancements in Robust Visual Localization and Mapping
Publications
| † Corresponding author | |
 SC-OmniGS: Self-Calibrating Omnidirectional Gaussian Splatting
In Proc. of International Conference on Learning Representations (ICLR),
2025
|
|
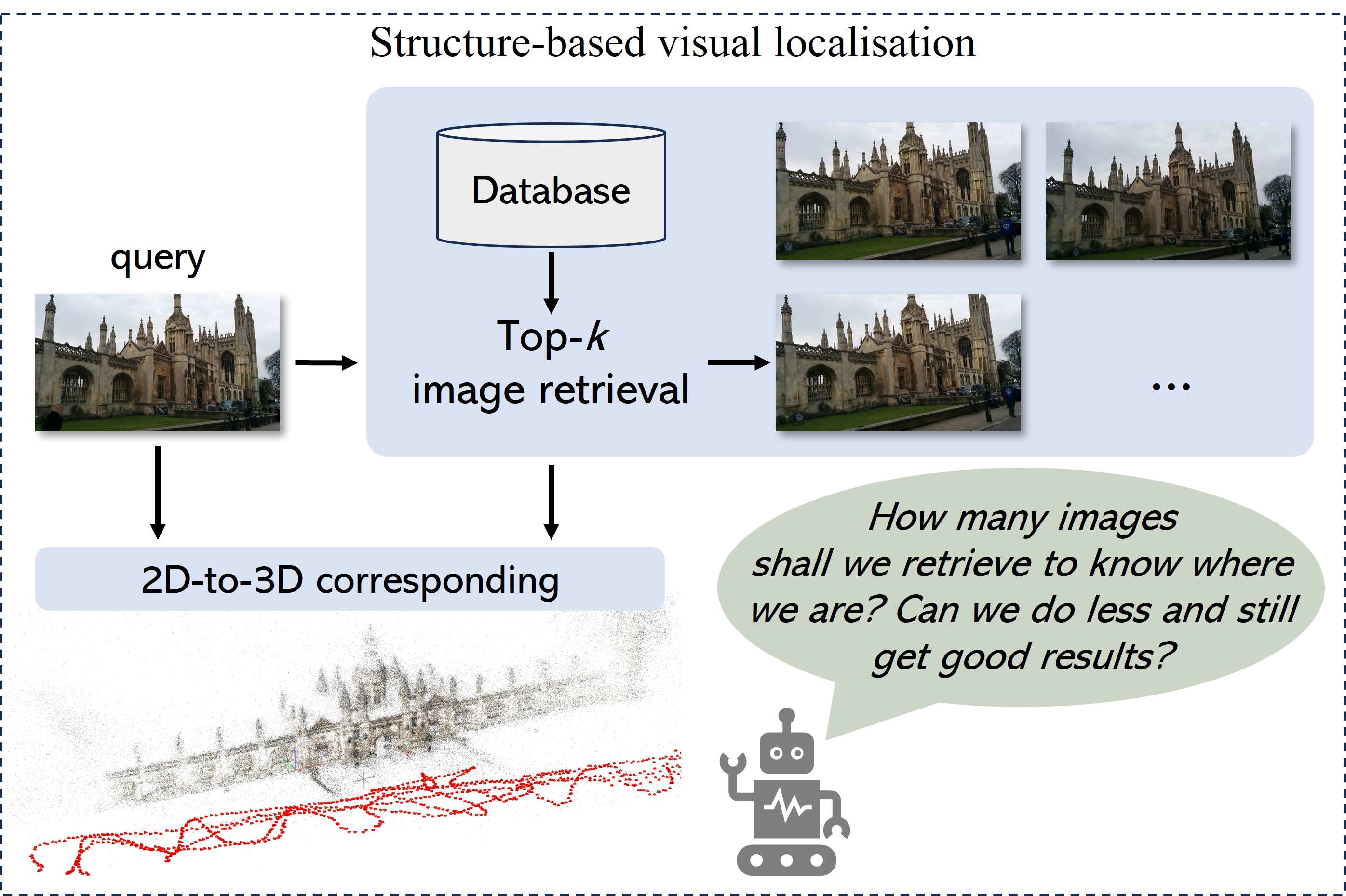 AIR-HLoc: Adaptive Retrieved Images Selection for Efficient Visual Localisation
In Proc. of the IEEE International Conference on Robotics and Automation (ICRA),
2025
|
|
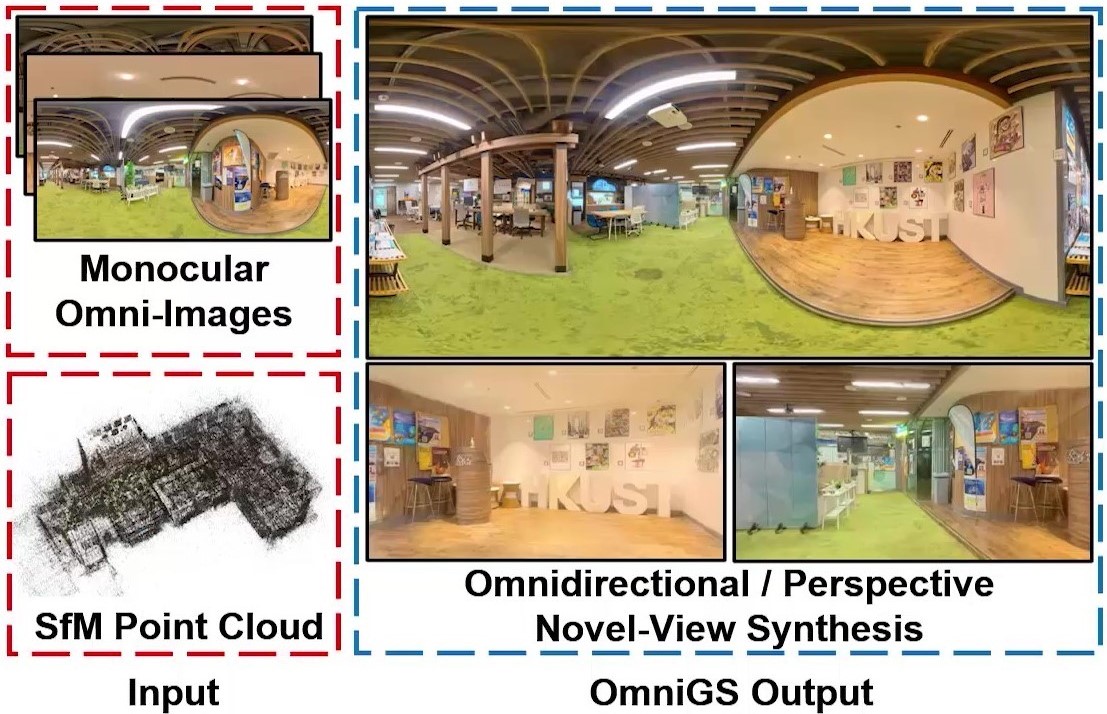 OmniGS: Fast Radiance Field Reconstruction using Omnidirectional Gaussian Splatting
In Proc. of Winter Conference on Applications of Computer Vision (WACV),
2025
|
|
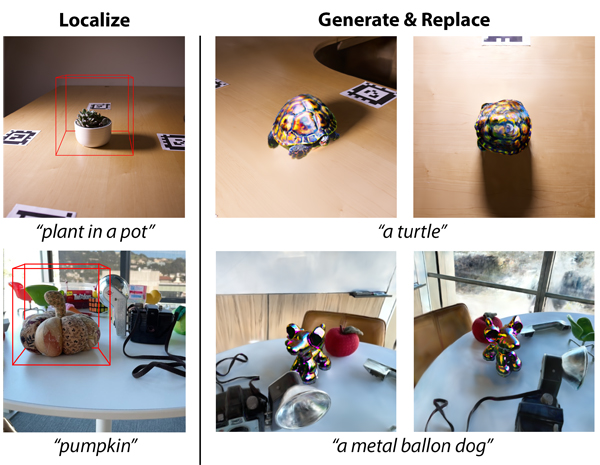 Localized Gaussian Splatting Editing with Contextual Awareness
In Proc. of Winter Conference on Applications of Computer Vision (WACV),
2025
|
|
 StyleCity: Large-Scale 3D Urban Scenes Stylization
In Proc. of European Conference on Computer Vision (ECCV),
2024
|
|
 Photo-SLAM: Real-time Simultaneous Localization and Photorealistic Mapping for Monocular, Stereo, and RGB-D Cameras
In Proc. of Computer Vision and Pattern Recognition Conference (CVPR),
2024
|
|
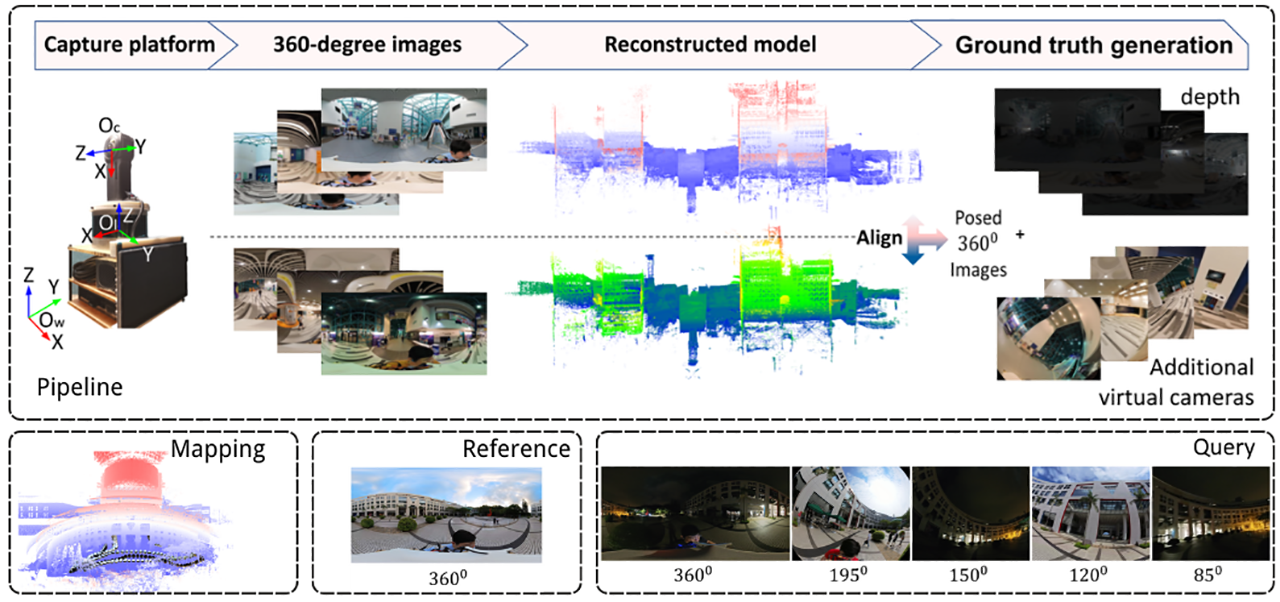 360Loc: A Dataset and Benchmark for Omnidirectional Visual Localization with Cross-device Queries
In Proc. of Computer Vision and Pattern Recognition Conference (CVPR),
2024
|
|
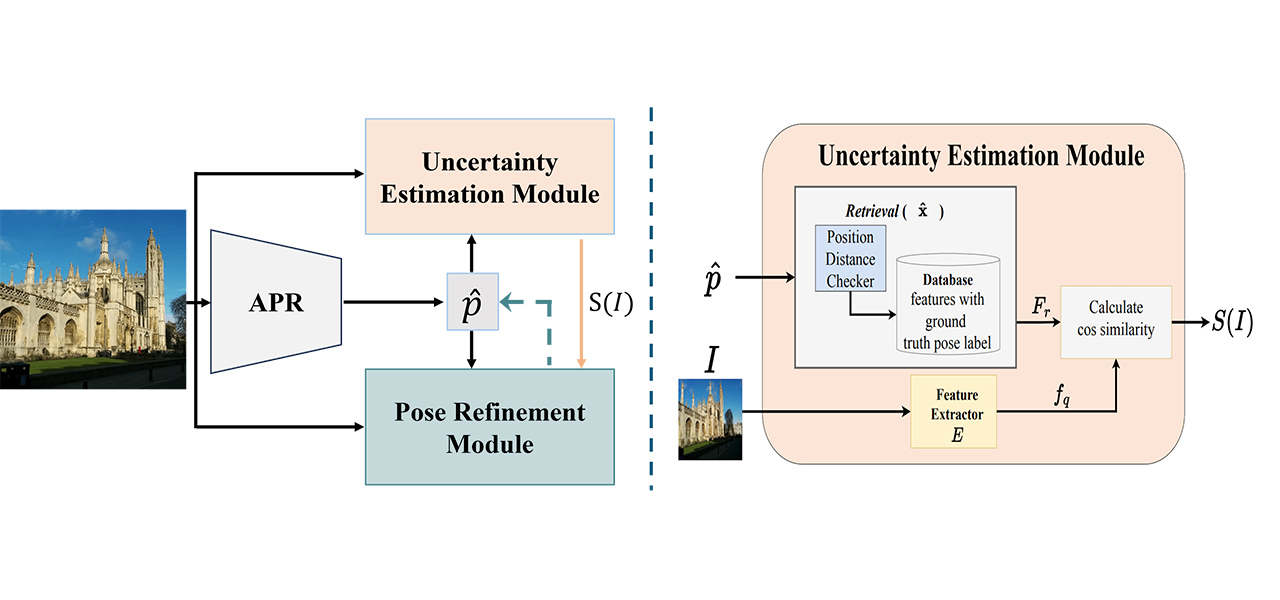 HR-APR: APR-agnostic Framework with Uncertainty Estimation and Hierarchical Refinement for Camera Relocalisation
In Proc. of the IEEE International Conference on Robotics and Automation (ICRA),
2024
|
|
 360VOT: A New Benchmark Dataset for Omnidirectional Visual Object Tracking
In Proc. of International Conference on Computer Vision (ICCV),
2023
|
|
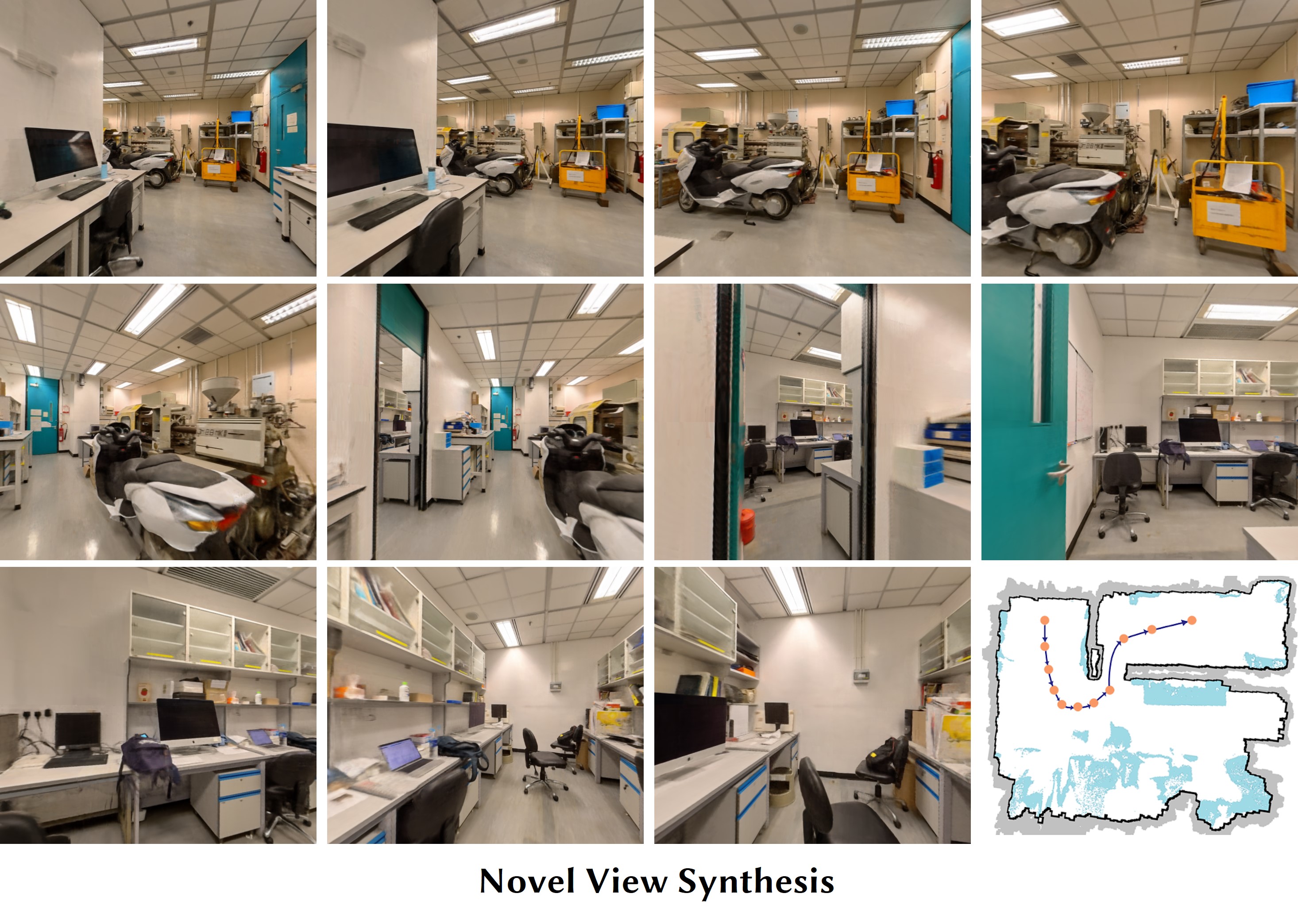
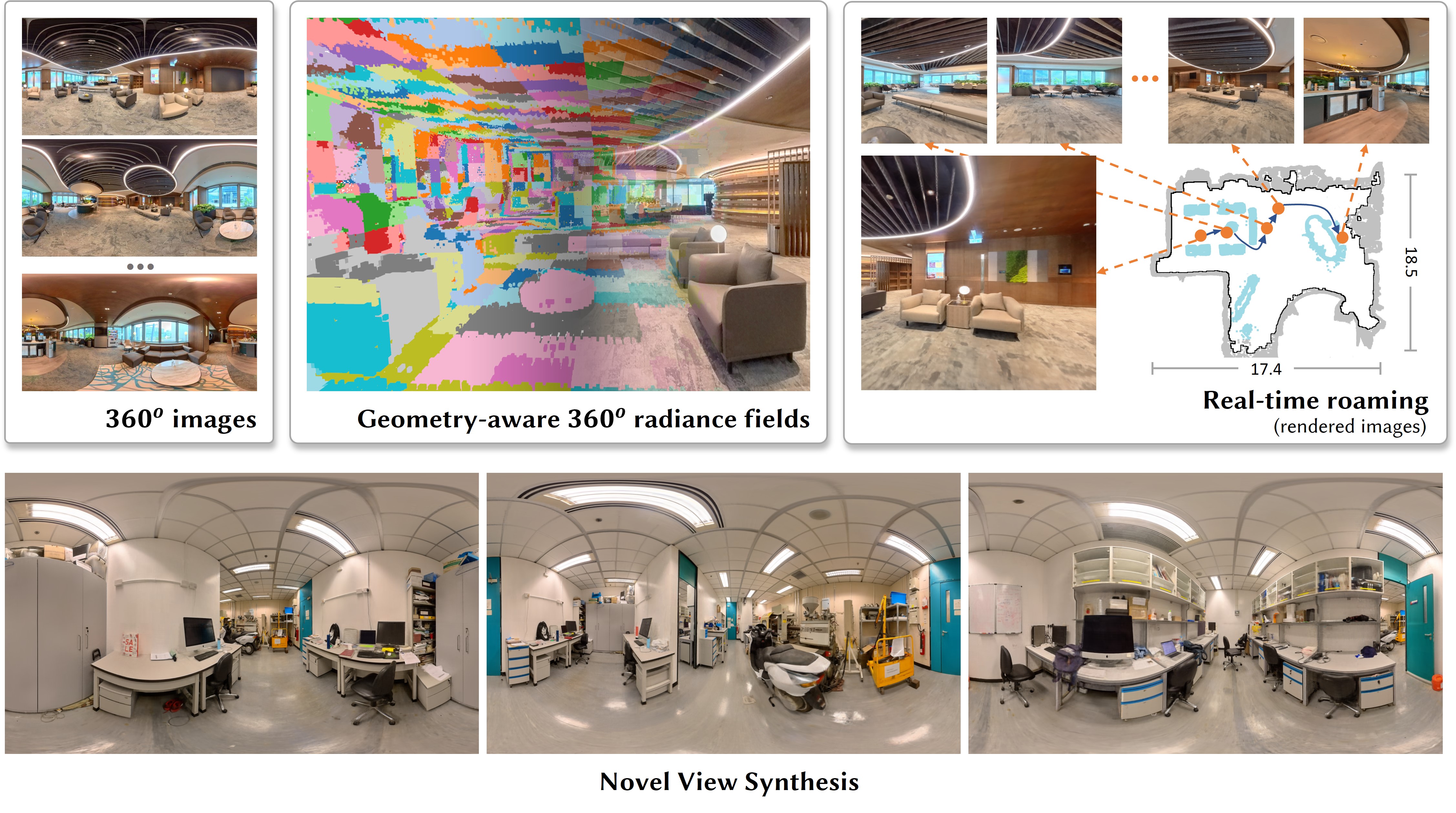 360Roam: Real-Time Indoor Roaming Using Geometry-Aware 360ᵒ Radiance Fields
|
|
 Real-Time Omnidirectional Roaming in Large Scale Indoor Scenes
SIGGRAPH Asia Technical Communications,
2022
|
|
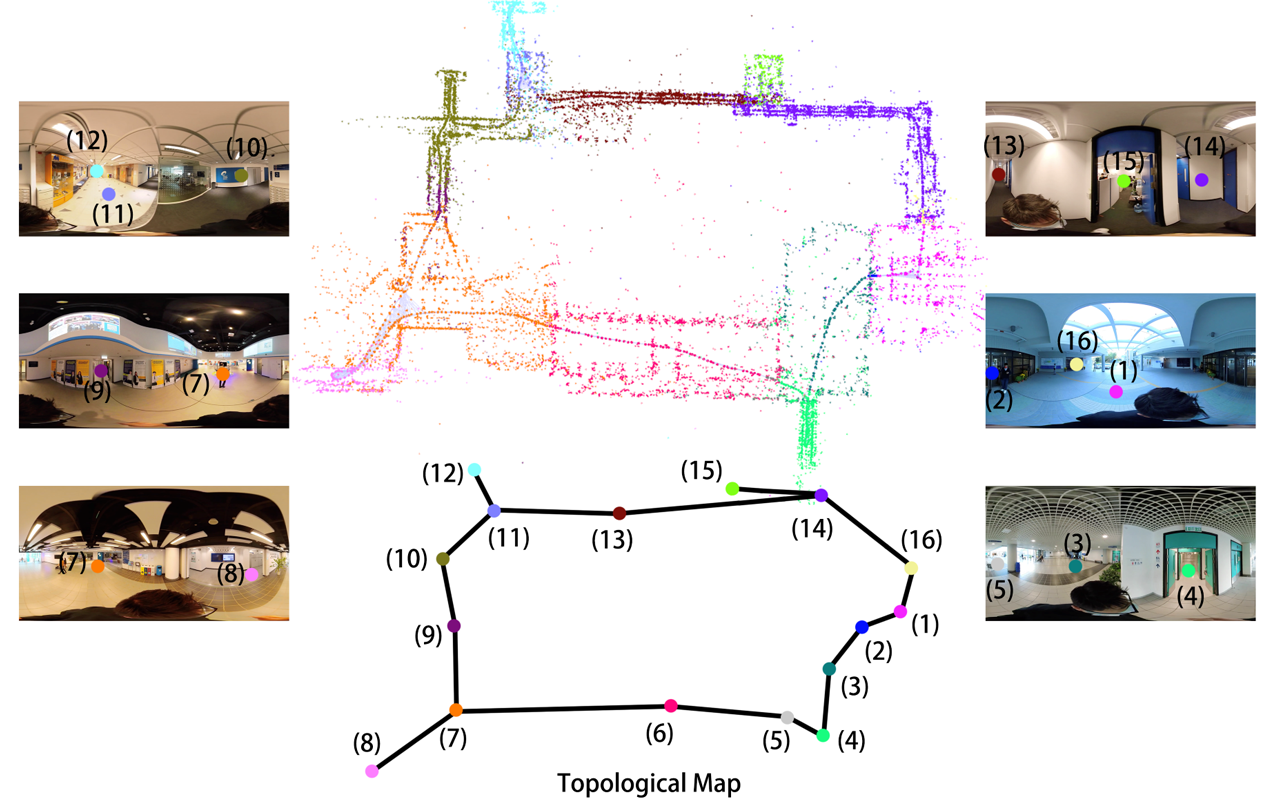 360ST-Mapping: An Online Semantics-Guided topological mapping Module for Omnidirectional Visual SLAM
In Proc. of International Conference on Intelligent Robots and Systems (IROS),
2022
|
|
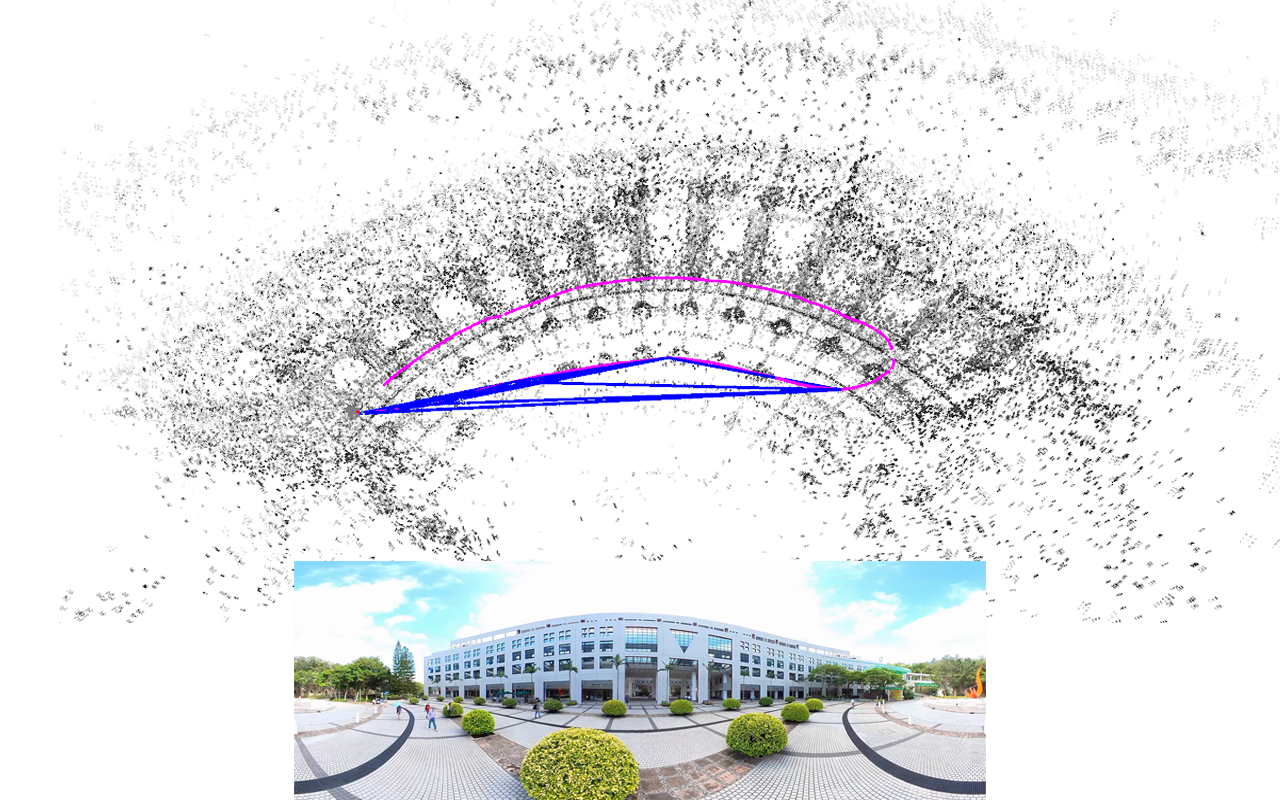 360VO: Visual Odometry Using A Single 360 Camera
In Proc. of the IEEE International Conference on Robotics and Automation (ICRA),
2022
|
|
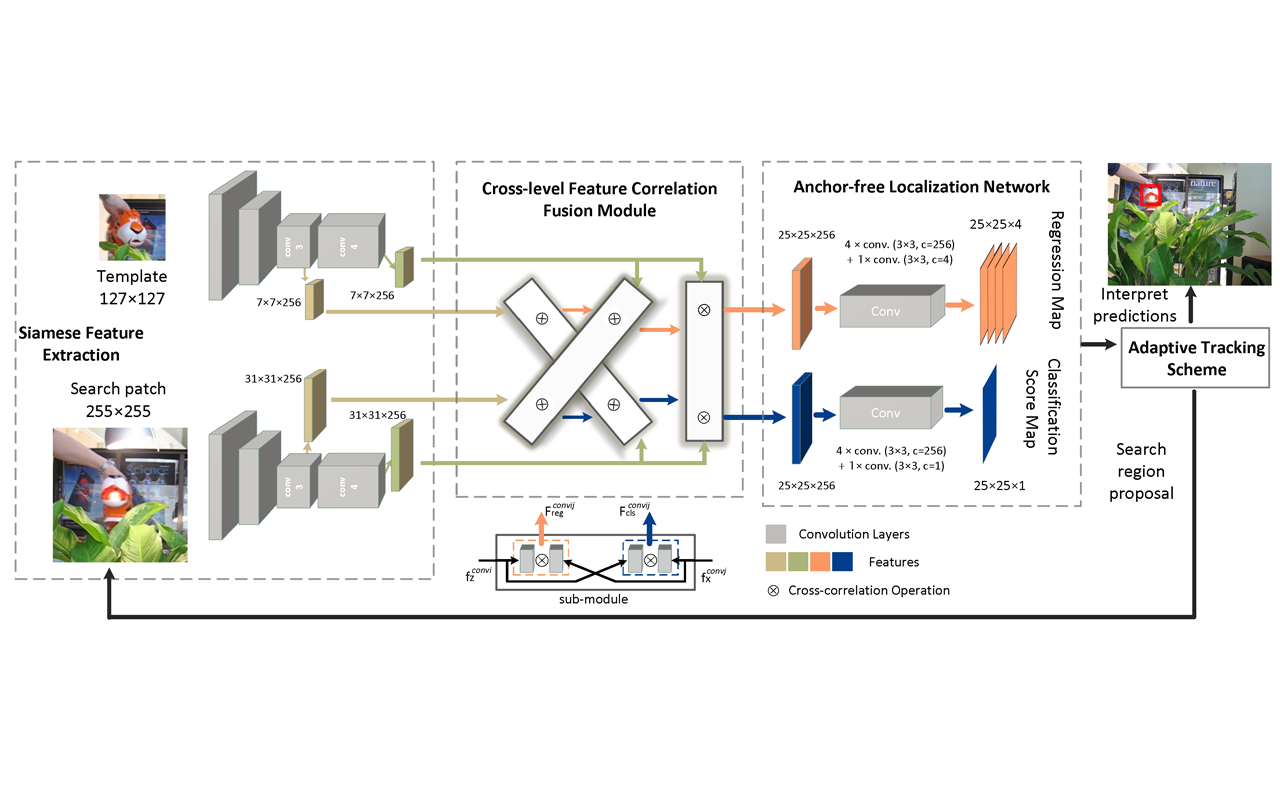 SiamX: An Efficient Long-term Tracker Using Cross-level Feature Correlation and Adaptive Tracking Scheme
In Proc. of the IEEE International Conference on Robotics and Automation (ICRA),
2022
|
|
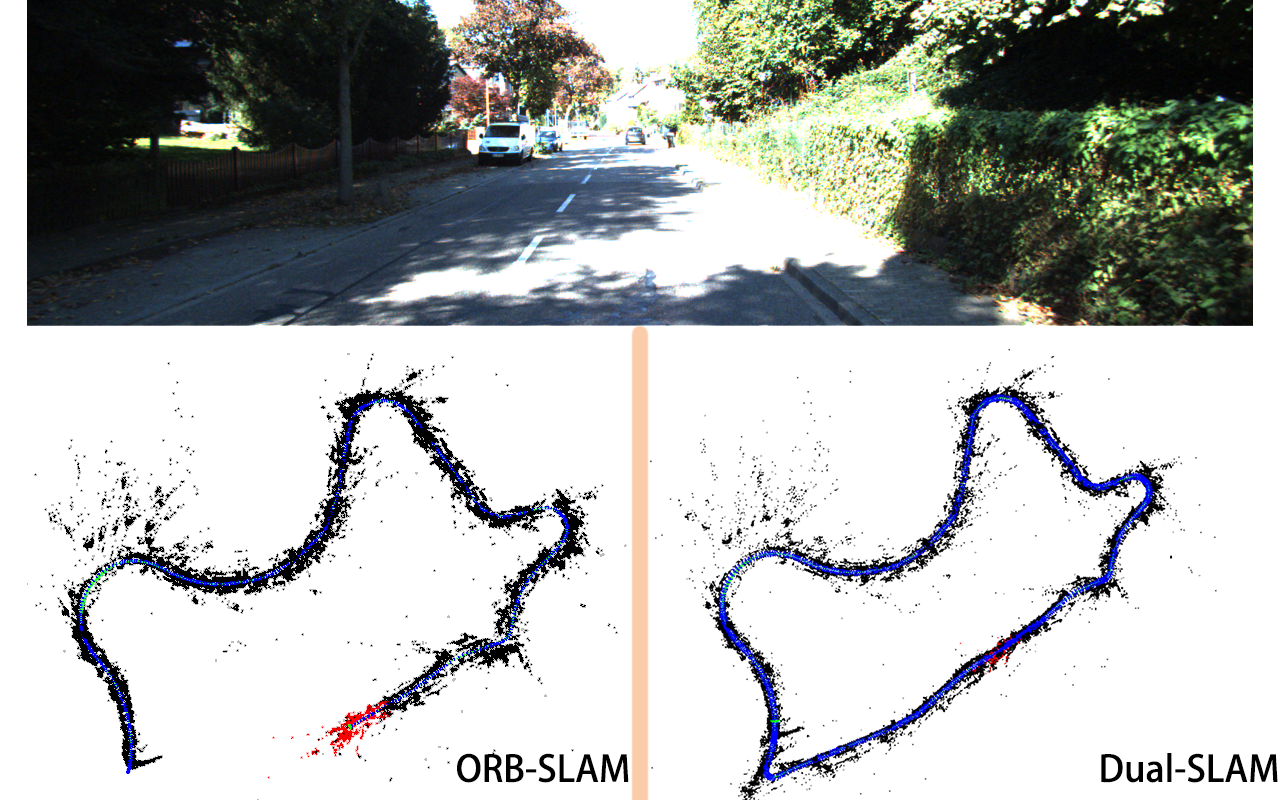 Dual-SLAM: A Framework for Robust Single Camera Navigation
In Proc. of International Conference on Intelligent Robots and Systems (IROS),
2020
|